The following is a Keynote I gave at the recent Artificial Life meeting in Japan. It was pretty different from any presentation I’ve given before, although it has connections to everything I often talk about. In this presentation I tried to do 3 things:
- Point out parallels between the process of scientific discovery, and the active inference loop that guides agents navigating their worlds. Specifically, I discussed the many connections between the process of automating and providing tools to accelerate discovery, and our attempts to understand diverse intelligences specifically. One key thing they all have in common is that exploration means being ready for all of the different places along the spectrum of persuadability. To some extent, all active agents are scientists, and all of science is a part of being. We simply don’t know, ahead of time, what the level of agency is in any of the things we encounter around us, and within us. We must determine it by interactions and experiments, which requires imagination as well as rigor.
- Take people who aren’t familiar with my work or the concept of agential materials on a brief tour of the special properties of living materials. The multi-scale competency architecture is of strong relevance to ALIFE and robotics/AI workers who want to build truly bio-inspired technology. Most critically, it means that discovery in the biosciences will involve use of tools of cognitive science, and learning how to communicate/collaborate with the material, not simply micromanage it as we do with (seemingly) passive matter. It also means that whatever automation we create for the life sciences needs to be aware that what it’s doing is cracking the language of a partially alien mind.
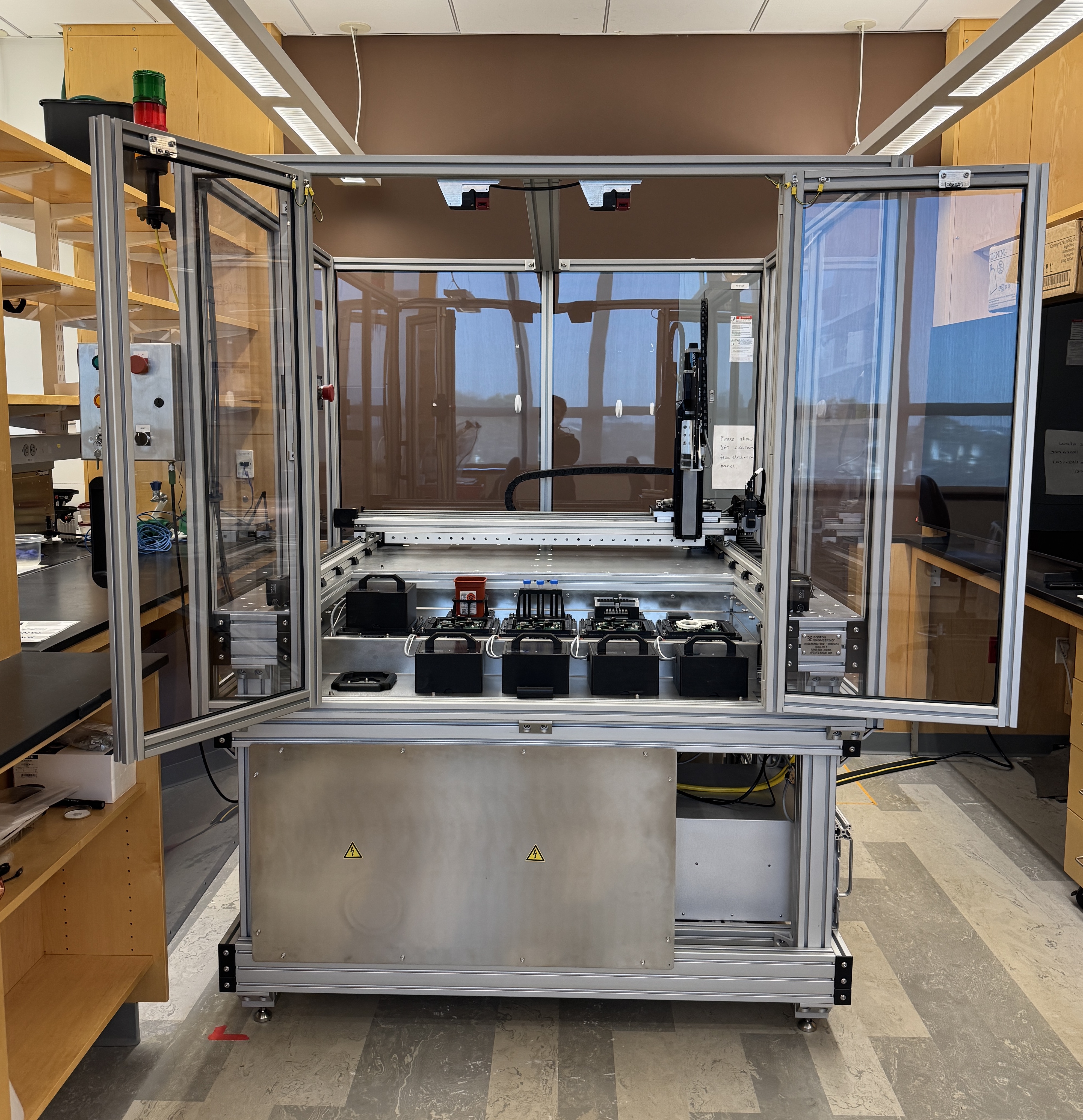
- Introduce the community to an ICDO project on which Josh Bongard, Doug Blackiston, and I are collaborating: the creation of a new robot scientist that is meant to be a discovery engine for accelerating and facilitating the field of synthetic morphology: performing cycles of hypothesis generation and laboratory testing. Using the Xenobot cellular platform first, it will attempt to crack the morphogenetic code, leading to not only useful synthetic living machines but also a better understanding of the goals and competencies of novel beings without a specific evolutionary history. More deeply, it is an example of a novel embodied mind: it has an AI-based cognitive system (located partially at UVM) and a physical body (located at Tufts) which does experiments on Xenobots (i.e., navigates the space of behavior-shaping cues for cells and improves its internal model of how cell collectives produce form and function). Building and collaborating with this system is, itself, a project in Diverse Intelligence because we are learning to relate to a highly unconventional novel composite being consisting of the Mombot robot, the living material inside it, and the human scientists who build, maintain, and learn from it. On a Meta level, I propose that the Mombot platform is the first of a forthcoming class of agential translation interfaces, enabling human scientists to better relate to the collective intelligence of Xenobots (and many other things it will help us reach)
The Mombot project is implemented by an amazing team including Doug Blackiston, the Bongard Lab, my lab, ethicist Jeantine Lunshof, and Boston Engineering (see the Acknowledgements slide at the end of the talk for a list of the many people who contributed to it). The biology, philosophy, and diverse-intelligence implications as expressed here are my own perspective on the meaning of the work, and not necessarily those of anyone on the team or of our funders.
The video of the talk itself:
and the slides can be downloaded here:
One unusual thing: since I couldn’t travel, the talk was given by telepresence, through a robot made for me by Marty Schwalm. I thought it was fitting to give a talk about a robot, which builds robots, through a robot. Here are some photos of it, taken by Olaf Witkowski and Ben Hartl:



Leave a Reply to Alex A. O. Kobold Cancel reply